tl;dr: I co-authored a HICCS publication on user preferences regarding control-related aspects of teleoperation in robotaxis. This blog post provides an overview of our study’s results.
Background
Despite the COVID situation, HICSS ’21 took place at the beginning of January, albeit unfortunately only in a virtual setting and not on Hawaii where it’s usually held. Notwithstanding this, I’m happy that the paper “Trust is Good, Control is Better-Customer Preferences Regarding Control in Teleoperated and Autonomous Taxis” I co-authored was accepted for publication at HICSS. Although the paper does not focus primarily on privacy, I want to provide a brief overview on the research we conducted in this blog post.
We conducted a choice-based conjoint analysis with a representative sample of the German population with roughly 550 participants where we described to participants a scenario where they could use autonomous robotaxis with teleoperation as a fallback solution in case the robotaxi could not proceed own its own.
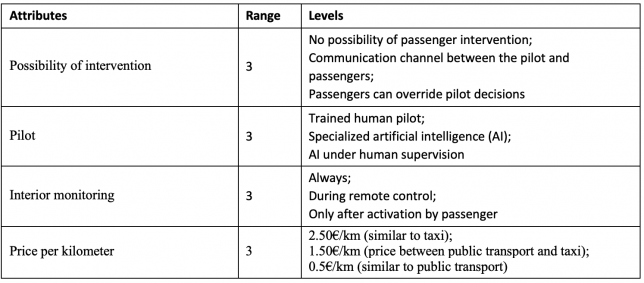
Basically, we wanted to find out which level of control potential users prefer regarding the actual driving and with respect to in-vehicle monitoring. We also wanted to investigate user preferences regarding the nature of the telepilot, i.e., whether users prefer a human telepilot over an automated telepilot in the backend. Finally, we also wanted to find out users’ willingness to pay for driving in automated, teleoperable taxis. Specifically, and as depicted in the following table, we investigated four attributes of teleoperable, autonomous taxis, namely “Possibility of Intervention”, “Pilot”, “Interior Monitoring” and Price.
Analysis & Results
I will only provide some of our results here and refer interested readers to the paper for more details. You also can find a summary of the main findings at the end of this post.
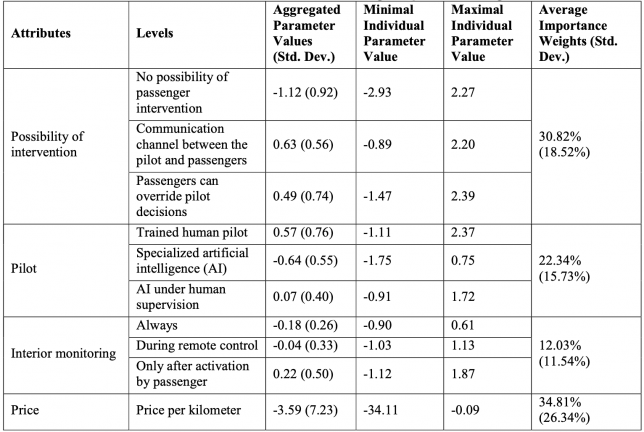
We found that participants’ preferences are highly heterogenous and that price is the most important factor in the purchase decision (although, again, with high heterogeneity). Apart price, participants found possibilities to intervene in teleoperation the most important attribute. The most preferred option in this regard was the availability of a communication channel to the telepilot. Privacy did play a role although participants focused more on the pilot and intervenability. Still, participants rather strongly preferred user-controlled monitoring over “always on” monitoring or “always on during teleoperation” monitoring.
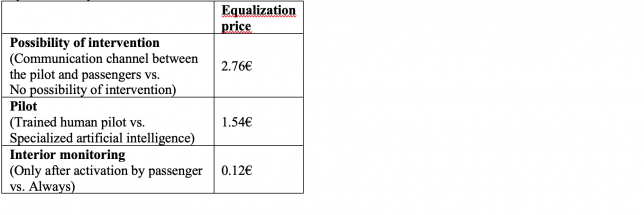
To gain deeper insight into participants’ preferences we also looked into equalization prices between the least and the most preferred attribute levels based on the average parameter values (see table below). The equalization price indicates the amount participants would be willing to pay to have the more preferred attribute level rather than the less preferred attribute level. Again, we found that possibility of intervention played a dominant role and privacy concerns played a comparatively minor role.
Finally, we conducted a cluster analysis to identify user segments in order to be able to understand the market on a segment-specific basis. We identified the five clusters depicted in the following table. More details on the clusters and how we interpreted them can be found in the paper.

Main Findings
Overall, our findings show that participants’ preferences are highly heterogenous and that price is the most important attribute. Aside from this, participants’ answers show a strong urge to be able to intervene. This may lead to unwanted passenger behavior, such as overuse of emergency stop feature if no other means for intervention are provided. This aligns with theory from other areas of information systems (notably information privacy research), which indicate that perceived control impacts perceived risk, and also affects intention to use. Interior monitoring of the vehicle seems to be a relatively minor concern, but, in general, has a negative impact, unless it is – once again – triggered by passenger interaction, in which case the system receives a positive valuation, further emphasizing the significance of user agency in the scenario we investigated. Our findings also align with previous research showing that user interfaces in AVs enabling advanced interaction build trust, sense of control, and enjoyment.